



 Srbija
Srbija
 Hrvatska
Hrvatska
 Bosna i Hercegovina
Bosna i Hercegovina

Nasin rover na Marsu se je skoraj teden dni "bojeval" s skalo (VIDEO)




Več dni je trajalo, preden se je marsovski rover Curiosity znebil manjše skale, ki se je zataknila na njegovi roki, potem ko je zavrtal vanjo. Operacija je bila zahtevna.
Pozornost tistih, ki spremljajo odkritja in "dogodivščine" Nasinega roverja Curiosity ("Radovednost") na Marsu, je pred kratkim pritegnil posnetek, ki kaže, kako se je "radovednež" več dni mučil, da bi z roke otresel manjšo skalo, ki se je na njej zataknila.

Robot se je nadležne kamnite gmote poskušal znebiti na različne načine – z vrtenjem, nagibanjem pod različnimi koti in tresenjem roke.
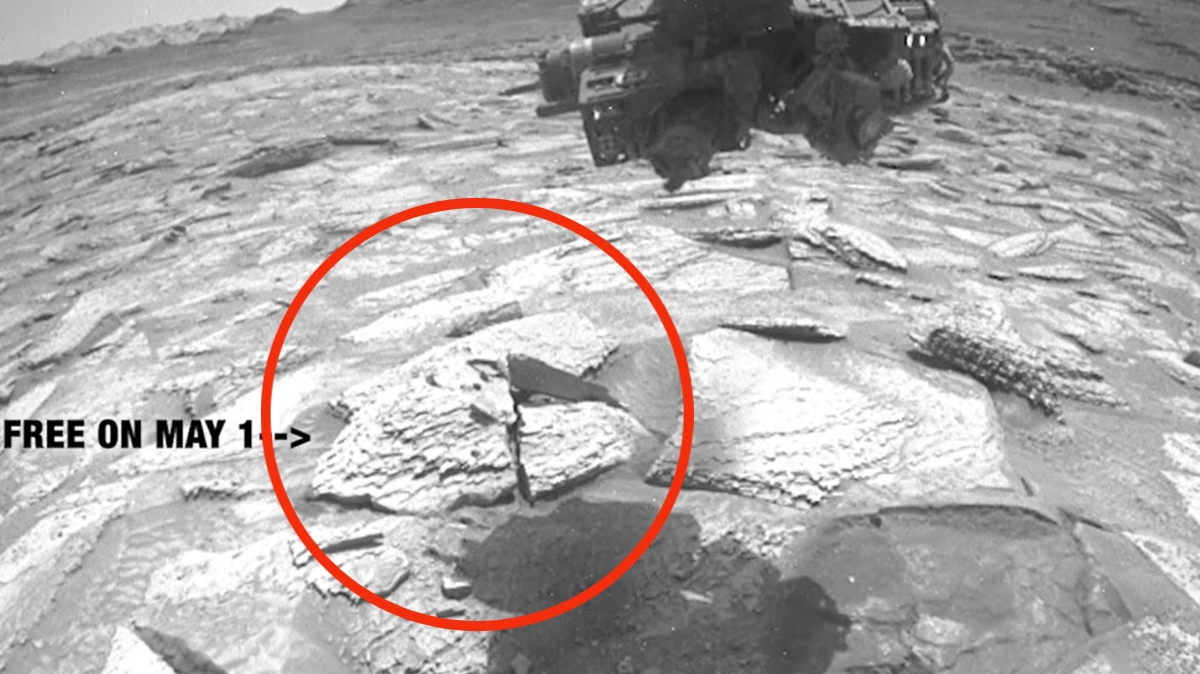
Na skalo, ki so jo poimenovali Atacama (po puščavi v Čilu), je rover naletel med raziskovanjem pobočij gore Sharp, ki stoji v osrčju kraterja Gale, blizu ekvatorja rdečega planeta.
Ploščata skala premera okoli 45 centimetrov in debela približno 15 centimetrov je bila idealen kandidat za nadaljnjo analizo.

25. aprila je tako Curiosity zavrtal v Atacamo, da bi pridobil vzorec, ki bi ga lahko analiziral v svojem laboratoriju, ki ga ima na krovu.
In čeprav je bilo vrtanje uspešno, se je hitro pokazalo, da je nekaj narobe.
"Ko je rover umaknil roko, se je celotna skala dvignila iz tal, obešena na fiksni tulec, ki obdaja vrteči se sveder," so v izjavi za javnost kasneje zapisali predstavniki Nase. "Vrtanje je v preteklosti že lomilo ali ločevalo zgornje plasti kamnin, vendar skala še nikoli ni ostala pritrjena na tulec svedra."
Ker se kaj takega še ni zgodilo, je znanstvenikom, ki na Zemlji upravljajo rover, to predstavljalo povsem nov problem.
Sprva so poskušali 13 kilogramov težko skalo odstraniti z vibriranjem svedra, a jim ni uspelo. Potem so to poskušali storiti s kombinacijo vibriranja svedra in preusmerjanjem roke. Vendar jim je s tem uspelo otresti le drobne, pesku podobne delce skale.

Šele 1. maja se je Atacama premaknila, potem ko je ekipa poskušala "še bolj nagniti roko in jo vrteti hkrati z vibriranjem in vrtenjem svedra.
Čeprav so to nameravali večkrat ponoviti, pa se je skala od roke ločila že v prvem poskusu in na veliko olajšanje ekipe padla nazaj na površje. Pri tem se je razlomila vsaj na dva dela, kažejo slike.
Prizor "boja" roverja s skalo pa je mnoge uporabnike spleta navdušil. "Fascinantno" je njihova zelo pogosta reakcija. Eden izmed njih pa je ob videu na YouTubu napisal: "Skala je bila zagotovo vesela, da se je po milijonih let premaknila."
Kako so nadzorniki vse skupaj izpeljali?
Je pa takšna situacija za ekipo, ki usmerja roverja Curiosity, precej zahtevna.
Roverja namreč ni mogoče "upravljati v živo", kot recimo na Zemlji upravljamo avtomobilček na daljinsko upravljanje.
Razlog je velika razdalja med Zemljo in Marsom.
Tudi do 40 minut dolg "odzivni čas"
Signal med Zemljo in Marsom potuje s svetlobno hitrostjo, vendar je tudi svetloba pri teh razdaljah "počasna".
Čas potovanja signala je odvisen od trenutne medsebojne oddaljenosti planetov.
Najkrajši čas za signal tako traja približno 3 minute, najdaljši pa približno 22 minut. Običajno pa signal potrebuje okoli 10 do 20 minut v eno smer.
To pomeni, da prav toliko časa traja, preden posadka dobi odgovor roverja. Skupni "odzivni čas" je lahko torej dolg tudi do 40 minut.
Zato inženirji roverjev pripravijo natančen paket ukazov, ki jih nato rover samostojno izvede ter pošlje nazaj fotografije in podatke. Ekipa potem rezultate analizira in pripravi naslednje korake.
Za zaplete, kot je bil ta s skalo Atacama, tako inženirji najprej analizirajo slike ter izdelajo simulacije odgovorov na Zemlji.
Tako so na primer preverili, ali bi premiki lahko poškodovali roverjevo roko. Šele nato so na Mars poslali zelo previdne ukaze.
Nasa ima v ta namen izdelane kopije roverjev, na katerih najprej preizkusijo postopke, preden navodila zanje pošljejo na Mars.






Kakšno je tvoje mnenje o tem?
Sodeluj v razpravi ali preberi komentarje




Kakšno je tvoje mnenje o tem?
Sodeluj v razpravi ali preberi komentarje



















































